Porting Detroit Become Human from PlayStation® 4 to PC – Part 2
Originally posted:
Last updated:
Lou Kramer
Ronan Marchalot
Nicolas Vizerie
Jonathan Siret
Part 2 written by Lou Kramer, AMD developer technology engineer.
This is a three part series, written jointly by Ronan Marchalot, 3D engine director, and 3D engine senior developers Nicolas Vizerie and Jonathan Siret from Quantic Dream, along with Lou Kramer, who is a developer technology engineer for AMD.
The information contained in the blog represents the view of AMD or of the third-party authors as of the posting date. The blog post contains the author’s own opinions and may not represent AMD’s positions, strategies, or opinions. AMD and/or the third-party authors have no obligation to update any forward-looking content. GD-84
Introduction
Hello, and welcome to part 2 of our series on porting Detroit: Become Human from PS4 to PC. In Part 1, Ronan Marchalot from Quantic Dream explained why they decided to use Vulkan® and talked about shader pipelines and descriptors. Here in part 2, Lou Kramer from AMD will discuss non-uniform resource indexing on PC and for AMD cards specifically.
Descriptor sets
The extension VK_EXT_descriptor_indexing became part of core with Vulkan® 1.2. This extension enables applications to select among descriptor sets with dynamic (non-uniform) indexes in the shader. Non-uniform means that the index can have different values across the whole subgroup.
For example, on RDNA, the size of a subgroup is either 32 or 64. All threads in a subgroup, also called lanes, are executed on a single SIMD-unit in parallel. Uniform variables are stored in scalar registers, one single value for all lanes. Non-uniform variables are stored in vector registers, storing a value for each lane individually.
By default, the index for accessing a resource in an array is considered uniform. Let’s look at the following example:
// the descriptor set, an array of 13 resources (textures)
// the threadgroup has 128 lanes so there are in total either 4 or 2 subgroups
// (of size 32 or respectively of size 64)
[numthreads(64,2,1)]
void main(uint3LocalThreadId : SV_GroupThreadID)
{
// the index that will be used to access an element in the descriptor set
uint index =0;
// load instruction for the texture at index 0
float4 value = imgDst[index].Load(LocalThreadId.xy);
// store instruction for the texture at index 1
imgDst[index +1][LocalThreadId.xy] = value;
}
The value of the variable index is uniform across all lanes in the single subgroups. In this simple example, it’s 0 and obvious that it’s uniform.
For the purpose of a case study, let’s have a look how a shader compiler handles this kind of code. Specifically, the shader compiler shipped with the Radeon driver 20.5.1 on a Radeon RX 5700 XT generates the following ISA:
Note: Don’t worry, you do not need to understand every single line! Also, every generated ISA presented in this post is based on the same driver and same GPU as stated above. This is subject to change when you use a different driver and GPU.
s_inst_prefetch 0x3
s_getpc_b64 s[0:1]
s_mov_b32 s0, s2
// here we load the descriptor for the texture we want to access:
// the descriptor of texture[0] is loaded to scalar registers s[4:11]
// the descriptors are always stored in scalar registers
// and thus, are uniform across all lanes
s_load_dwordx8 s[4:11], s[0:1], 0x0
s_waitcntlgkmcnt(0)
// we load from descriptor stored at s[4:11] -> points to texture[0]
float4 value = imgDst[index].Load(LocalThreadId.xy);
imgDst[index +1][LocalThreadId.xy] = value;
}
Remember, per specification, index must still be uniform – so it holds the same value for every lane in a single subgroup. Is this true in the example?
LocalThreadId.xy can vary between the lanes. However, on AMD GPUs, the lane index pattern for compute shaders is row major. This means, a threadgroup has either four subgroups with the lane indexes [0,31][0];[32,63][0];[0,31][1];[32,63][1] or two subgroups with the lane indexes [0,63][0];[0,63][1] . Hence, LocalThreadId.y is uniform across a subgroup.
Lane indexes in a subgroup of size 32:
[0, 31][0]
[32,63][0]
[0, 31][1]
[32,63][1]
Lane indexes in a subgroup of size 64:
[0, 63][0]
[0, 63][1]
Each cell is one subgroup, with indexes [x][y] . Note, that for y , only one value is possible per subgroup as y is uniform across all lanes of a single subgroup.
As the spec requires the index to be uniform, the compiler can treat index as uniform without confirming this fact. The compiler is allowed to assume the code is conforming to specification. Therefore, the compiler can generate ISA based on the fact that index is uniform.
The ISA is as follows:
s_inst_prefetch 0x3
s_getpc_b64 s[0:1]
// only load the value of gl_LocalInvocationID.y of the first active lane
// as index is considered a uniform value, it must be equal across all lanes
// store it in a scalar register
v_readfirstlane_b32 s0, v1
s_mov_b32 s3, s1
s_lshl_b32 s0, s0, 5
// load the texture descriptor from texture[gl_LocalInvocationID.y-from-first-lane]
Note the usage of readFirstLane – the index for accessing the texture array is loaded as a uniform value. This is totally fine, as we know, that index is in fact uniform. But what happens when we change the threadgroup xy ?
[numthreads(16,8,1)]
Now, LocalThreadId.y is non-uniform per subgroup – the lane indexes of the subgroup in the threadgroups are:
[0, 15][0, 1]
[0, 15][2, 3]
[0, 15][4, 5]
[0, 15][6, 7]
The generated ISA is still the same as above though, it does not depend on the threadgroup size – and thus, the final output would be incorrect! To solve this issue, we must add the NonUniformResourceIndex keyword (or in GLSL the nonuniformEXT keyword).
When adding the NonUniformResourceIndex keyword the code looks as follows:
The generated ISA is more complicated, as the compiler cannot assume a uniform value for index anymore and it’s also not an obvious case as in the very first example, where we assigned index to a constant value.
s_inst_prefetch 0x3
s_getpc_b64 s[0:1]
s_mov_b32 s0, s2
v_lshlrev_b32_e32 v2, 5, v1
s_mov_b32 s2, exec_lo
s_mov_b32 s3, exec_lo
s_nop 0
s_nop 0
_L2:
// we still have readfirstlane here, the descriptor is loaded in
// scalar registers. We can’t pick different descriptors
// in parallel, but must pick them one by one
v_readfirstlane_b32 s4, v2
// check if we picked the right descriptor for the lane
// if yes, load from the texture at the picked descriptor
What is happening here? The compiler makes sure to add the logic for iterating through all the lanes until every lane has the correct index. This is also called ‘waterfall’, if you ever stumble over that term 😊
For each unique index, we would go through one more loop iteration. In the case with [numthreads(16,8,1)] we need two iterations to cover all cases. For example, for the first threadgroup one iteration for LocalThreadId.y == 0 , and the other iteration for LocalThreadId.y == 1 .
For the case with the thread group size of [numthreads(64,2,1)] it’s in fact just one iteration.
Both cases produce the correct output with above generated ISA, but with [numthreads(64,2,1)] , the logic for iterating through the different values of index is unnecessary because there is only one possible value for index per subgroup.
To remove the loop, the compiler must know in advance that there is only one unique value for index per subgroup. The complexity to do this depends on the specific case. Also, there are cases where the compiler is simply not able to determine if a value is uniform or non-uniform.
The take-away points until now are the following:
Add the non-uniform qualifier where it is needed, otherwise you could see corruptions or other bad things might happen. A missing NonUniformResourceIndex keyword for non-uniform indexes is violating the spec.
Adding the non-uniform qualifier to all texture accesses can substantially degrade performance on some hardware.
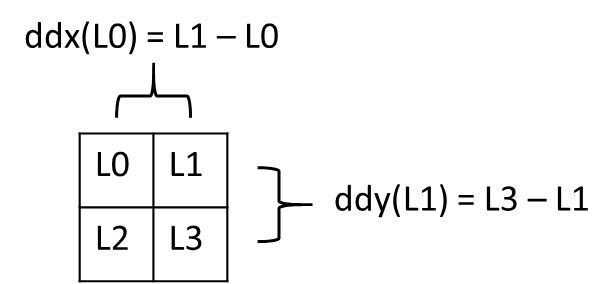
Implicit derivatives
In fragment shaders, texture access that needs to determine the correct Level of Detail, or uses anisotropic filtering, relies on the calculation of implicit derivatives. The derivatives are computed based on the values across a 2×2 group of fragment shaders (a quad) for the current primitive.
Unfortunately with the current Vulkan® (and DirectX®) API specifications, it’s not actually guaranteed which quad is used to determine the derivatives, it just has to be accurate for the current primitive being rendered. If the sampling instruction is not called in uniform control flow within the primitive, the derivatives are undefined.
To ensure that the derivatives are defined, the sampling instruction must always be called in fully uniform control flow across the draw, or within a condition based only on the primitive ID and uniform values.
Non-uniform resource indexing
A similar problem occurs when the index of a resource array is non-uniform. Implementations are free to assume that a resource being accessed is indexed uniformly, and if it’s not, then the access is invalid. In AMD’s current implementation this will lead to undefined values returned by the sampling instruction.
Lou is part of AMD's European Game Engineering Team. She is focused on helping game developers get the most out of Radeon™ GPUs using Vulkan® and DirectX®12 technologies.