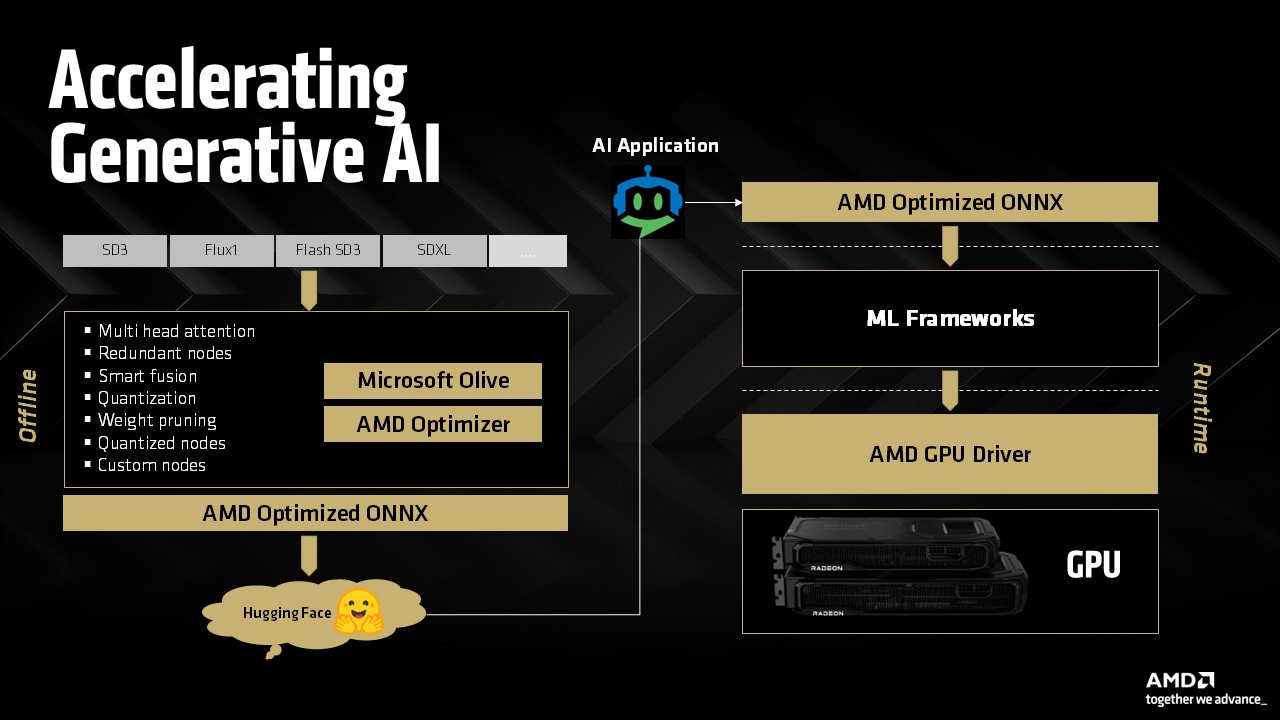
Accelerating Generative AI on AMD Radeon™ GPUs
Discover AMD-optimized ONNX models on Hugging Face for AMD Ryzen™ AI APUs and Radeon™ GPUs and incredible performance with the AMD Radeon RX 9000 Series' advanced AI accelerators.
In the previous two Laplacian posts, we developed a HIP implementation of a finite-difference code designed around a Laplace operator and applied two possible code optimizations to optimize memory movement between the L2 cache and global memory. This third part will cover some additional optimizations and general tips to fine tune the performance of the kernel. To quickly review, recall that the Laplacian takes the form of a divergence of a gradient of a scalar field :
The performance of the baseline HIP implementation we started off with in Part 1 achieved around 50%[1] of the theoretical peak. However, based on initial rocprof analyses, we projected that the finite difference kernel should reach at least 71%[1] of the peak. To meet this goal, we applied two optimizations:
Introduced loop tiling to explicitly reuse loaded stencils
Reordered the read access pattern of the stencil points
Please see the reordering read access patterns section in Part 2 for the full code implementation. With these changes, we have reached 95% of the performance projection, but we still have some open questions:
The previous optimizations required manual tuning of certain parameters that could lead to strange performance characteristics where performance suddenly drops from a large tiling factor. Could fixing the root cause of this performance drop get us closer to the target figure of merit (FOM) as defined in Part 1?
We have focused solely on optimizing the kernel’s cache and data reuse of the fetch operations. Could we make some gains by improving the same aspects of the write operations?
The optimizations we have introduced required non-trivial code changes. Are there alternative optimizations we could leverage to gain significant performance without the increase in code complexity?
This blog post will explore some of these remaining questions. The next few sections will introduce and discuss the following concepts:
Generating temporary files to understand register usage and scratch memory
Applying launch bounds to control register usage
Applying nontemporal stores to free up more cache
In the loop tiling optimization described in the previous post, a tiling factor m=16 caused the kernels’ FOM to deteriorate. The rocprof metric FETCH_SIZE rose to over 4x the theoretical limit and the L2CacheHit metric dropped below 50%. We suspect the high tiling factor proliferated the register usage, causing spillage. To this end, we introduce a new compilation flag —save-temps which tells the compiler to generate important information regarding register usage, spills, occupancy, and much more for every GPU kernel. It also includes instruction set architecture (ISA) dumps for both host and device code. A future lab notes post will cover the AMD GPU ISA in full detail.
We examine four key metrics:
SGPR
VGPR
Scratch
Occupancy
SGPR and VGPR refer to the scalar and vector registers, Scratch refers to scratch memory which could be an indicator of register spills, and Occupancy represents the maximum number of wavefronts that can run on the Execution Unit (EU). Note that statistics for register and scratch use can be found directly from rocprof output files whereas other details like occupancy and ISA assembly can only be found from the temporary files. Users can simply uncomment the line #TEMPS=true in the provided makefile to generate temporary files located in a file named temps/laplacian_dp_kernel1-hip.s containing this information. Here is some sample output for the baseline HIP kernel 1:
.section .AMDGPU.csdata; Kernel info:; codeLenInByte = 520; NumSgprs: 18; NumVgprs: 24; NumAgprs: 0; TotalNumVgprs: 24; ScratchSize: 0; MemoryBound: 0; FloatMode: 240; IeeeMode: 1; LDSByteSize: 0 bytes/workgroup (compile time only); SGPRBlocks: 2; VGPRBlocks: 2; NumSGPRsForWavesPerEU: 18; NumVGPRsForWavesPerEU: 24; AccumOffset: 24; Occupancy: 8; WaveLimiterHint : 1; COMPUTE_PGM_RSRC2:SCRATCH_EN: 0; COMPUTE_PGM_RSRC2:USER_SGPR: 8; COMPUTE_PGM_RSRC2:TRAP_HANDLER: 0; COMPUTE_PGM_RSRC2:TGID_X_EN: 1; COMPUTE_PGM_RSRC2:TGID_Y_EN: 1; COMPUTE_PGM_RSRC2:TGID_Z_EN: 1; COMPUTE_PGM_RSRC2:TIDIG_COMP_CNT: 2; COMPUTE_PGM_RSRC3_GFX90A:ACCUM_OFFSET: 5; COMPUTE_PGM_RSRC3_GFX90A:TG_SPLIT: 0In addition to the ISA dump, there is a lot of information to unpack here. We defer all interested readers to this presentation as well as the register pressure post for more details on registers, scratch, occupancy, and more.
The table below contains the above four key metrics for the baseline and optimized kernel with various tiling factors m:
| SGPR | VGPR | Scratch | Occupancy | |
|---|---|---|---|---|
| Kernel 1 – Baseline | 18 | 24 | 0 | 8 |
| Kernel 3 – Reordered loads m=1 | 24 | 18 | 0 | 8 |
| Kernel 3 – Reordered loads m=2 | 26 | 28 | 0 | 8 |
| Kernel 3 – Reordered loads m=4 | 34 | 54 | 0 | 8 |
| Kernel 3 – Reordered loads m=8 | 52 | 90 | 0 | 5 |
| Kernel 3 – Reordered loads m=16 | 90 | 128 | 180 | 4 |
There is a strong correlation between the tiling factor and register/scratch usage. At m=16, register usage has increased to the point where it “spills” into scratch space, that is, registers that no longer fit in the register space are offloaded into global memory. There is also a strong but inverse correlation between occupancy, defined as waves per EU, and register use – as register usage goes up, the occupancy goes down. So what can be done to prevent spills or increase occupancy?
One quick way to control register usage is to apply launch bounds to the kernel. By default, the HIP compiler restricts the number of registers per thread based on the maximum allowable thread block size of 1024 threads. If the thread block size is known at compile time, it is a good practice to set the launch bounds for the kernel. Setting launch bounds takes the following arguments:
__launch_bounds__(MAX_THREADS_PER_BLOCK,MIN_WAVES_PER_EU)The first argument MAX_THREADS_PER_BLOCK informs the compiler about the thread block dimensions such that it can optimize the register usage for the particular block size. The second argument MIN_WAVES_PER_EU is an optional argument that specifies the minimum number of wavefronts required to be active on each EU. By default, this second value is set to 1 and does not need to be modified whereas the default MAX_THREADS_PER_BLOCK value of 1024 needs to be changed because we are not using all 1024 threads.
So far, we have been using a thread block size of 256 1 1, so here is how to set the launch bounds with MAX_THREADS_PER_BLOCK = 256 for Kernel 3:
template <typename T>__launch_bounds__(256)__global__ void laplacian_kernel(...) {
...Let us designate this one-line change “Kernel 4” and examine the impact on register and scratch space usage:
| SGPR | VGPR | Scratch | Occupancy | |
|---|---|---|---|---|
| Kernel 1 – Baseline | 18 | 24 | 0 | 8 |
| Kernel 3/Kernel 4 – Reordered loads m=1 | 24/24 | 18/18 | 0/0 | 8/8 |
| Kernel 3/Kernel 4 – Reordered loads m=2 | 26/26 | 28/28 | 0/0 | 8/8 |
| Kernel 3/Kernel 4 – Reordered loads m=4 | 34/34 | 54/54 | 0/0 | 8/8 |
| Kernel 3/Kernel 4 – Reordered loads m=8 | 52/52 | 90/94 | 0/0 | 5/5 |
| Kernel 3/Kernel 4 – Reordered loads m=16 | 90/84 | 128/170 | 180/0 | 4/2 |
Applying launch bounds to tiling factors m=4 and below had no effect on the register usage. When m=8, only the VGPR increased slightly, whereas for m=16 the VGPR increased greatly and the scratch usage was eliminated altogether. Notice that the occupancy drops significantly raising questions as to whether this will negatively affect performance at m=16. Let us look at the FOM performance:
| Speedup | % of target | |
|---|---|---|
| Kernel 1 – Baseline | 1.00 | 69.4% |
| Kernel 3 – Reordered loads m=1 | 1.20 | 82.9% |
| Kernel 3 – Reordered loads m=2 | 1.28 | 88.9% |
| Kernel 3 – Reordered loads m=4 | 1.34 | 93.1% |
| Kernel 3 – Reordered loads m=8 | 1.37 | 94.8% |
| Kernel 3 – Reordered loads m=16 | 0.42 | 29.4% |
| Kernel 4 – Launch bounds m=1 | 1.20 | 82.9% |
| Kernel 4 – Launch bounds m=2 | 1.28 | 88.9% |
| Kernel 4 – Launch bounds m=4 | 1.34 | 93.1% |
| Kernel 4 – Launch bounds m=8 | 1.39 | 96.1% |
| Kernel 4 – Launch bounds m=16 | 1.34 | 93.2% |
Unsurprisingly, kernels where the launch bounds had no effect on register, scratch, or occupancy had the same performance as before. There is a clear correlation between how much the launch bounds affected the SGPR, VGPR, Scratch, and Occupancy statistics and how much performance was gained. Kernels with tiling factors m=8 and m=16 saw improvements in their respective performances. Let us examine the corresponding rocprof metrics:
| FETCH_SIZE (GB) | Fetch efficiency (%) | L2CacheHit (%) | |
|---|---|---|---|
| Theoretical | 1.074 | – | – |
| Kernel 1 – Baseline | 2.014 | 53.3 | 65.0 |
| Kernel 3 – Reordered loads m=1 | 1.347 | 79.7 | 72.0 |
| Kernel 3 – Reordered loads m=2 | 1.166 | 92.1 | 70.6 |
| Kernel 3 – Reordered loads m=4 | 1.107 | 97.0 | 68.8 |
| Kernel 3 – Reordered loads m=8 | 1.080 | 99.4 | 67.7 |
| Kernel 3 – Reordered loads m=16 | 3.915 | 27.4 | 44.5 |
| Kernel 4 – Launch bounds m=1 | 1.346 | 79.8 | 72.0 |
| Kernel 4 – Launch bounds m=2 | 1.167 | 92.1 | 70.6 |
| Kernel 4 – Launch bounds m=4 | 1.107 | 97.0 | 68.8 |
| Kernel 4 – Launch bounds m=8 | 1.080 | 99.4 | 67.3 |
| Kernel 4 – Launch bounds m=16 | 1.094 | 98.2 | 66.1 |
NOTE: Although neither
WRITE_SIZEnor Write efficiency(%) were shown for these experiments, the reportedWRITE_SIZEand Write efficiency(%) forKernel 3 - Reordered loads m=16was 2.547 GB and 41.7%, respectively. Kernels without scratch spills have nearly 100% write efficiency.
Now that m=16 with launch bounds no longer spills registers into scratch, we saw significant gains in the speedup, fetch efficiency, and L2CacheHit. Users working on optimizing kernels with high register usage can quickly gain performance back by applying launch bounds. Although the kernel with m=8 has much lower register usage compared to m=16, applying launch bounds still had an impact on the VGPR usage thereby increasing overall performance just enough to become the best performing kernel yet. The new FOM from the kernel with m=8 is still a little short of our projected target, so let us explore another code optimization.
Most of our optimization efforts focused on improving spatial locality, however what we have not considered yet is temporal locality – that is to say, how to prioritize the caching of variables in time. Both loading the elements of u as well as storing the elements of f will occupy cache lines. The difference though is that based on the data layout described in Part 1, each element of u could theoretically be reused up to six times whereas each element of f is accessed only once. Thus, we can use the clang’s builtin nontemporal store intrinsic to let f bypass the L2 cache, thereby increasing the available cache for entries in u. It should also be noted that these intrinsics are specific to AMD GPUs.
The AMD clang compiler provides two overloaded builtins allowing generation of non-temporal loads and stores:
T __builtin_nontemporal_load(T *addr);void __builtin_nontemporal_store(T value, T *addr);In the Laplacian examples, we only need the nontemporal stores. Let us first apply this builtin to the initial baseline kernel:
| Kernel 1 (Before) | Kernel 1 (After) |
| |
To assess the impact of this simple code modification, we compare the performance of the baseline implementation, with and without the nontemporal store, with that of Kernel 3 when m=1:
| Speedup | % of target | |
|---|---|---|
| Kernel 1 – Baseline | 1.00 | 69.4% |
| Kernel 1 – Nontemporal store | 1.19 | 82.5% |
| Kernel 3 – Reordered loads m=1 | 1.20 | 82.9% |
The improvement from changes in a single line of code are comparable to that of refactoring the entire baseline kernel to leverage loop tiling and reordered memory access patterns. Examining the rocprof stats:
| FETCH_SIZE (GB) | Fetch efficiency (%) | L2CacheHit (%) | |
|---|---|---|---|
| Theoretical | 1.074 | – | – |
| Kernel 1 – Baseline | 2.014 | 53.3 | 65.0 |
| Kernel 1 – Nontemporal store | 1.429 | 75.2 | 71.4 |
| Kernel 3 – Reordered loads m=1 | 1.347 | 79.7 | 72.0 |
The statistics are also comparable between the nontemporal store and reordered loads when m=1. These findings suggest that leveraging the overloaded builtins for nontemoral memory access could actually be the first optimization users apply, as it is a “lower hanging fruit” requiring modifications to only a single line of code. The obvious next question is what happens when you combine the builtin nontemporal store with that of loop tiling factor m=8 and launch bounds? Let us again perform a one-line modification to kernel 4:
| Kernel 4 (Before) | Kernel 5 (After) |
| |
This new Kernel 5 is an accumulation of the optimizations involving loop tiling, reordering loads, applying launch bounds, and leveraging nontemporal stores. The performance when the looping tiling factor m=8 can be seen below:
| Speedup | % of target | |
|---|---|---|
| Kernel 1 – Baseline | 1.00 | 69.4% |
| Kernel 3 – Reordered loads m=8 | 1.37 | 94.8% |
| Kernel 4 – Launch bounds m=8 | 1.39 | 96.1% |
| Kernel 5 – Nontemporal store m=8 | 1.44 | 100% |
With all the optimizations combined, this enabled us to achieve a 1.44x speedup and meet 100% of our target!
Let us examine the rocprof metrics once again:
| FETCH_SIZE (GB) | Fetch efficiency (%) | L2CacheHit (%) | |
|---|---|---|---|
| Theoretical | 1.074 | – | – |
| Kernel 1 – Baseline | 2.014 | 53.3 | 65.0 |
| Kernel 3 – Reordered loads m=8 | 1.080 | 99.4 | 67.7 |
| Kernel 4 – Launch bounds m=8 | 1.080 | 99.4 | 67.3 |
| Kernel 5 – Nontemporal store m=8 | 1.074 | 100 | 67.4 |
Over the course of these improvements, we have reduced the number of loads from global memory by half. The measured fetch and write sizes have reached the theoretical limits so further performance improvements must come from other areas. Since the reported effective memory bandwidth has reached the projected goal, there is likely little room left for further improvement.
The third part of the Laplacian finite difference series introduces two additional optimizations, both requiring changes involving only a single line of source code. We also introduced readers to temporary files that give further insight into a kernel’s scratch usage, register pressure, and occupancy, all of which can be simply altered by applying launch bounds to the kernel. When compared to leveraging loop tiling and reordered memory loads, applying built-in non-temporal loads is easier to implement and provides a significant performance boost to the initial HIP implementation, therefore it should be preferred to kernel refactoring. We reiterate though, that these built-in intrinsics are not portable and are specific to AMD GPUs. All four optimizations presented thus far, when combined, enables our effective memory bandwidth to reach its projected goal.
However, there are still some outstanding questions. The last three posts of this Laplacian series focused on optimizations tailored towards a problem size of nx,ny,nz = 512, 512, 512 run on a single GCD of the MI250X GPU. What happens if we run kernel 5 on other hardware and problem sizes? Will other performance issues arise? The next and final post in this Laplacian series will explore these in depth.
If you have any questions or comments, please reach out to us on GitHub Discussions
Testing conducted using ROCm version 5.3.0-63 and MI250X single GCD. Benchmark results are not validated performance numbers, and are provided only to demonstrate relative performance improvements of code modifications. Actual performance results depend on multiple factors including system configuration and environment settings, reproducibility of the results is not guaranteed.