AMD FidelityFX™ Single Pass Downsampler (SPD)
AMD FidelityFX Single Pass Downsampler (SPD) provides an AMD RDNA™ architecture optimized solution for generating up to 12 MIP levels of a texture.
Cross-lane operations are an efficient way to share data between wavefront lanes. This article covers in detail the cross-lane features that GCN3 offers. I’d like to thank Ilya Perminov of Luxsoft for co-authoring this blog post.
We’ll be optimizing communication between work-items, so it is important to start with a consistent set of terminology:
This hardware organization affects cross-lane operations – some operations work at the wavefront level and some only at the row level. We’ll discuss the details below.
Local data share (LDS) was introduced exactly for that reason: to allow efficient communication and data sharing between threads in the same compute unit. LDS is a low-latency RAM physically located on chip in each compute unit (CU). Still, most actual compute instructions operate on data in registers. Now, let’s look at the peak-performance numbers. The memory bandwidth of AMD’s Radeon R9 Fury X is an amazing 512 GB/s. Its LDS implementation has a total memory bandwidth of (1,050 GHz) * (64 CUs) * (32 LDS banks) * (4 bytes per read per lane) = 8.6 TB/s. Just imagine reading all the content of a high-capacity 8 TB HDD in one second! Moreover, the LDS latency is an order of magnitude less than that of global memory, helping feed all 4,096 insatiable ALUs. LDS is only available on a workgroup level.
At the same time, the register bandwidth is (1,050 GHz) * (64 CUs) * (64 lanes) * (12 bytes per lane) = 51.6 TB/s. That’s another order of magnitude, so communication between threads is much slower than just crunching data in the thread registers.
But can we do better by sharing? The answer is yes, if we further reduce our scope from a workgroup to a single wavefront.
As a previous post briefly described, GCN3 includes two new instructions: ds_permute_b32 and ds_bpermute_b32 . They use LDS hardware to route data between the 64 lanes of a wavefront, but they don’t actually write to an LDS location. These instructions don’t require pairing; they simply provide a different way to express the lane addressing. The ds_permute_b32 instruction implements forward permute (“push” semantics), or simply “put my data in lane i,” and ds_bpermute_b32 (note the letter ‘b’ before permute ) implements backward permute (“pull” semantics), or “read data from lane i.” They have the following syntax:
ds_permute_b32 dest, addr, src [offset:addr_offset] // push to destds_bpermute_b32 dest, addr, src [offset:addr_offset] // pull from src
// Examples:ds_permute_b32 v0, v1, v2ds_bpermute_b32 v0, v0, v1 offset:0x10where dest, addr and src are VGPRs (vector general purpose registers) and addr_offset is an optional immediate offset. Both instructions take data from src , shuffle it on the basis of the provided address ( addr + addr_offset ) and save it to the dest register. The whole process divides into two logical steps:
The permute instructions move data between lanes but still use the notion of byte addressing, as do other LDS instructions. Hence, the value in the addr VGPR should be desired_lane_id * 4 , since VGPR values are 4 bytes wide.
The instructions add the addr_offset immediate to the addr value before accessing the temporary buffer, and this immediate can be used to rotate src values. Note that the instructions require a byte address, but they only move fully aligned doublewords. To put it another way, they only use bits [7:2] of the final address.
In many cases, the permute address is based on a work-item ID or lane ID. The work-item ID is loaded into v0 (and possibly v1 and v2 for multidimensional groups) before kernel execution. If you need the lane ID, try the following code, which fills VGPR v6 with that ID:
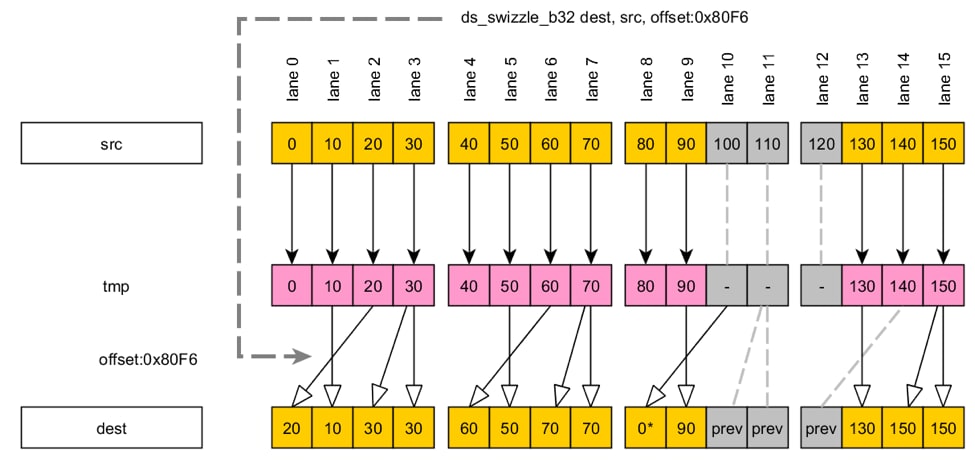
v_mbcnt_lo_u32_b32 v6, -1, 0v_mbcnt_hi_u32_b32 v6, -1, v6Consider the following ds_bpermute_b32 example with a simplified eight-lane wavefront; the VGPRs appear in yellow, the temporary buffer ( tmp ) in pink and inactive lanes in gray.
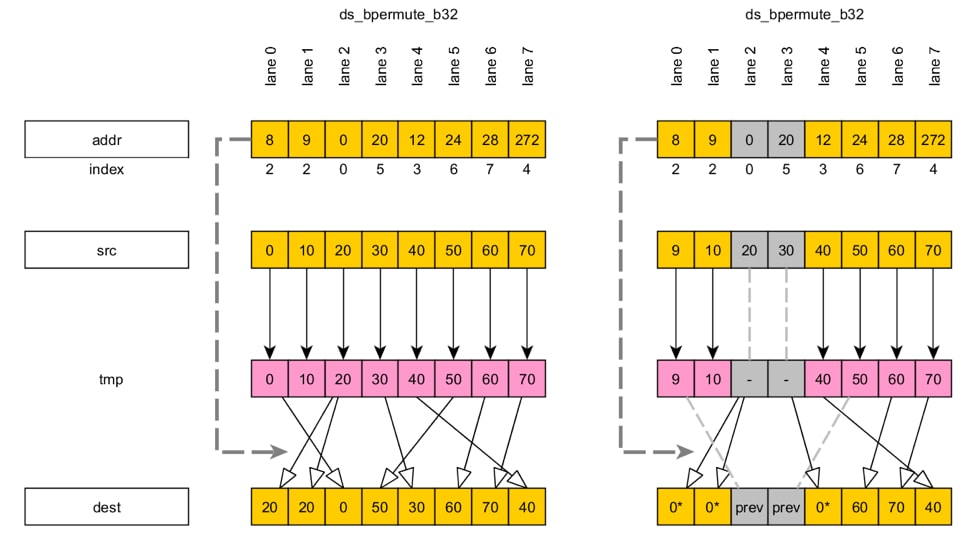
In the first step, all lanes write data from src to corresponding locations in tmp . In the second step, they all read data from the tmp buffer on the basis of the address in addr . The index number shows the actual index of the tmp element from the second step. As the figure above illustrates, addr values in lanes 0 and 1 are different. Both values point to the same tmp element, however, because the two least-significant address bits are ignored. Similarly, address 272 in lane 7 wraps around and points to element 4 in the src register.
The right side of the figure shows an example using the same argument values but with the EXEC mask disabling lanes 2 and 3. As a result, the instruction won’t overwrite the dest elements corresponding to those lanes. Moreover, some lanes read from uninitialized tmp elements and thus receive a zero value.
Now consider a ds_permute_b32 example using the same arguments as before:
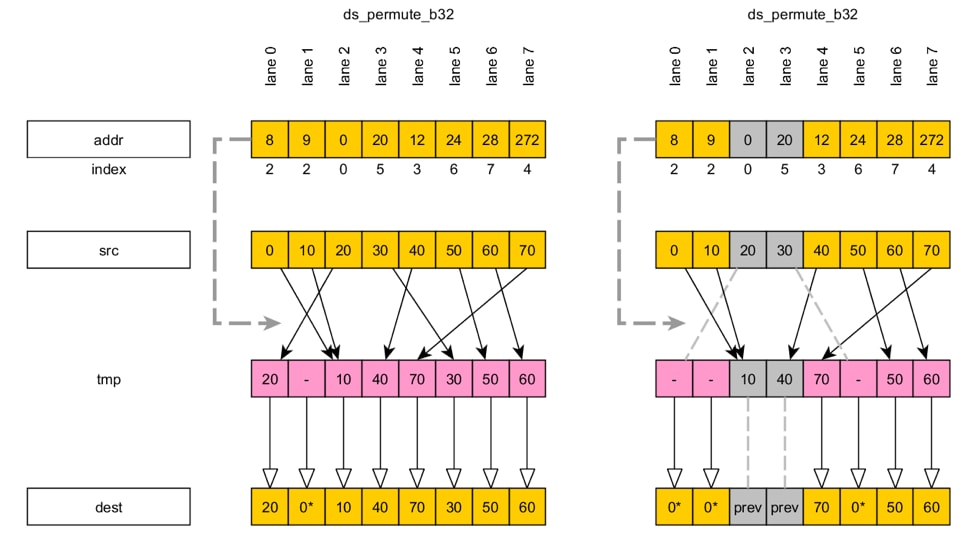
All lanes write src data to the tmp buffer on the basis of the addresses in the addr register, followed by a direct read in the second step. Everything else here is the similar to the first example, with one exception: some lanes can write to the same tmp element (consider lanes 0 and 1 in the figure above). Such a situation is impossible in the case of ds_bpermute_b32 . This conflict is resolved in the same way as writing to the same LDS address: the lane with the greater ID wins.
The ds_swizzle_b32 instruction allows lanes to exchange their data in some limited ways. The advantage relative to permute instructions is that ds_swizzle_b32 requires no additional VGPR—the swizzle pattern is encoded in the instruction’s offset field. Moreover, this feature will most likely save a few address generation instructions required for ds_permute . The swizzle instruction has the following syntax:
ds_swizzle_b32 dest, src offset:ds_pattern// Examples:ds_swizzle_b32 v5, v2 offset:0x80F6A ds_swizzle_b32 implements “pull” semantics: each lane reads some element of src . The EXEC mask functions in the same way as in the case of the permute instructions. The 15th bit of ds_pattern controls which of the two modes will be used:
ds_pattern LSBs directly encode the element ID for each lane.ds_pattern .The diagram below shows the ds_pattern layout for each mode:
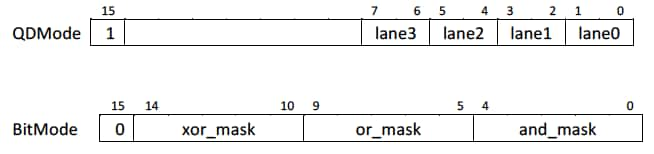
Consider the formal ds_pattern description:
// QDMode - full data sharing in 4 consecutive threadsif (offset[15]) { for (i = 0; i < 32; i+=4) { thread_out[i+0] =
thread_valid[i+offset[1:0]] ? thread_in[i+offset[1:0]] : 0; thread_out[i+1] = thread_valid[i+offset[3:2]] ? thread_in[i+offset[3:2]] : 0; thread_out[i+2] = thread_valid[i+offset[5:4]] ? thread_in[i+offset[5:4]] : 0; thread_out[i+3] = thread_valid[i+offset[7:6]] ? thread_in[i+offset[7:6]] : 0; }}
// BitMode - limited data sharing in 32 consecutive threadselse { and_mask = offset[4:0]; or_mask = offset[9:5]; xor_mask = offset[14:10]; for (i = 0; i < 32; i++) { j = ((i & and_mask) | or_mask) ^ xor_mask; thread_out[i] = thread_valid[j] ? thread_in[j] : 0; }}// Same shuffle applied to the second half of wavefrontQDMode is clear, as the following example illustrates:

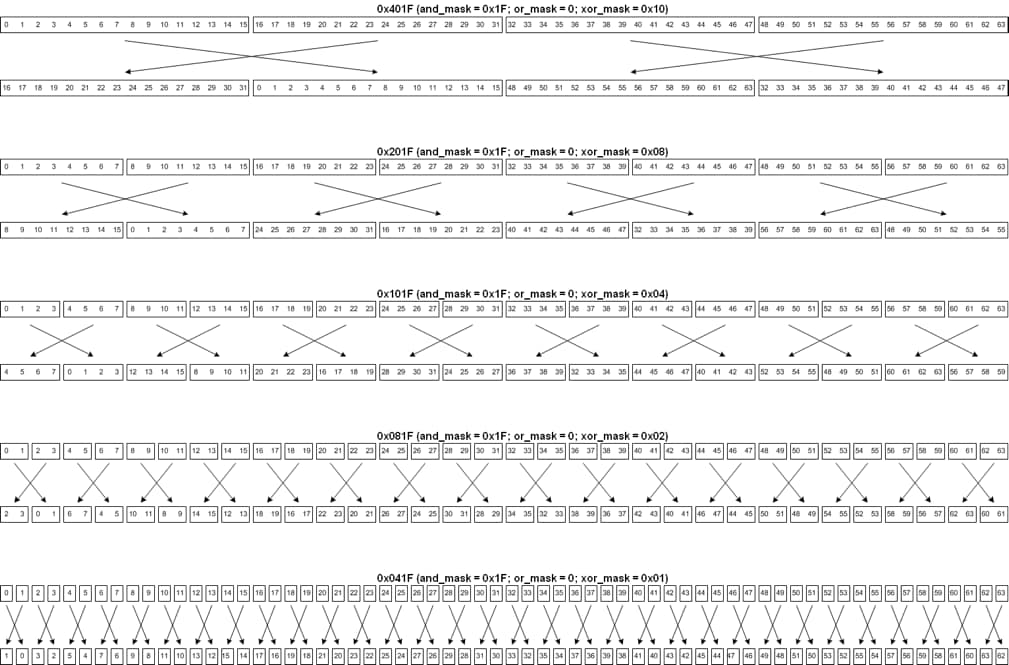
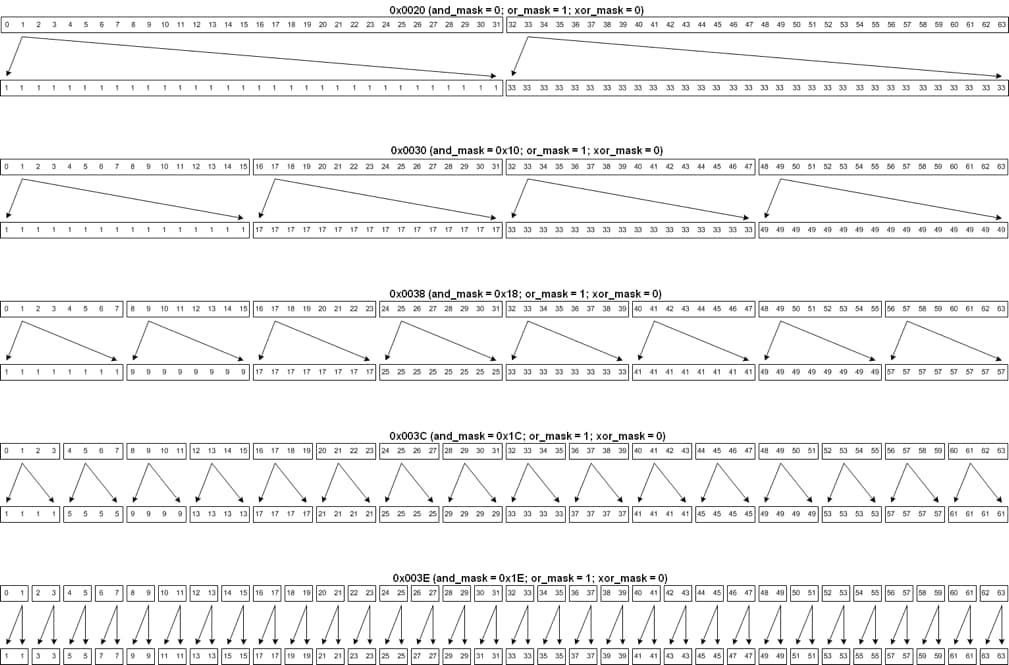
On the other hand, BitMode looks more complicated; and_mask , or_mask and xor_mask apply sequentially to the lane index, as the code above shows. By setting these masks, you can choose one of the operations applied to each bit of the lane index: set to 0, set to 1, preserve or inverse. Some of the interesting patterns are the following:
Swap the neighboring groups of 1, 2, 4, 8 or 16 lanes ( and_mask = 0x1F , or_mask = 0x0 and only one bit is set in xor_mask ):
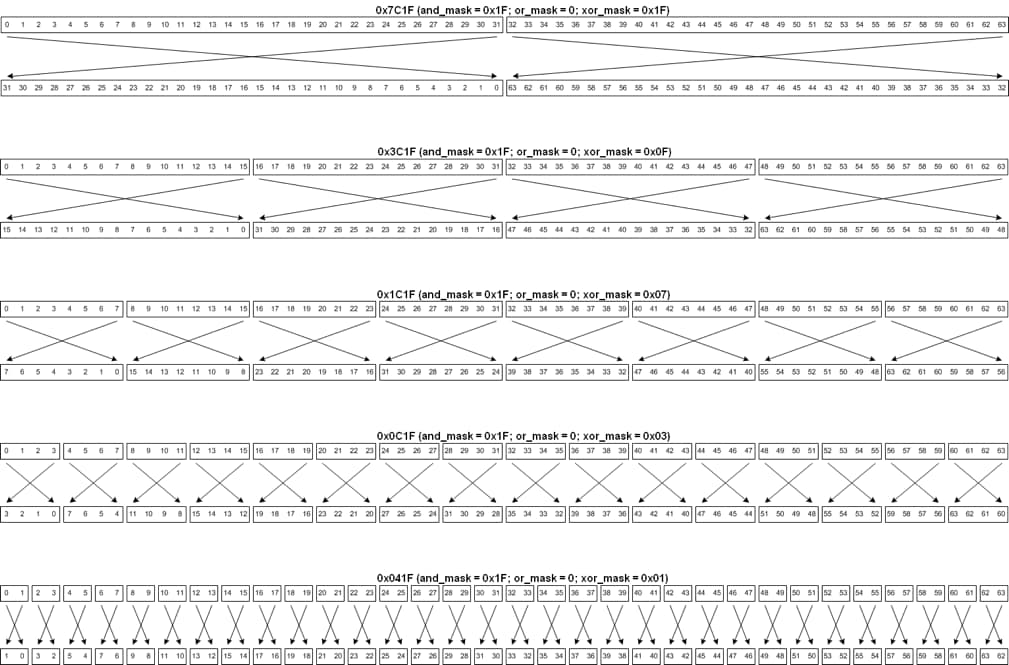
Mirror/reverse the lanes for groups of 2, 4, 8, 16 or 32 lanes ( and_mask = 0x1F, or_mask = 0x0 and the LSBs of xor_mask are set to 1):
Broadcast the value of any particular lane for groups of 2, 4, 8, 16 or 32 lanes ( and_mask MSBs are 1 and LSBs are 0, or_mask is the lane index for a group, and xor_mask = 0x0 ):
The permute and swizzle instructions employ LDS hardware. Thus, you must use s_waitcnt to determine when data is returned to the destination VGPR. Such an approach, however, has many advantages compared with manually passing data using LDS memory:
ds_write* and ds_read* , so it executes faster and saves space in the instruction cache.Now it’s time to talk about something really cool! The DPP feature doesn’t employ new instructions; rather, it introduces the new VOP_DPP modifier, which allows VALU instructions to access data in neighboring lanes. Spending additional instruction to move data (even with the swizzle and permutes) is unnecessary—now, most of the vector instructions can do cross-lane reading at full throughput.
Of course, there’s no magic, so this feature only supports limited data sharing. DPP was developed with scan operations in mind, so it enables the following patterns (the corresponding DPP keywords appear in brackets):
quad_perm )wave_shl )wave_shr )wave_ror )wave_rol )row_shl )row_shr )row_ror )row_mirror )row_half_mirror )row_bcast )row_bcast )Here, the term row means one-quarter of a wavefront (more on this subject later). The VOP_DPP modifier can work with any VOP1 or VOP2 instruction encoding (the VOP3 and VOPC encodings are unsupported), except the following:
v_clrexcp
v_readfirstlane_b32
v_madmk_{ f16,f32}
v_madak_{ f16,f32}
v_movrel*_b32
The DPP modifier is encoded as a special 32-bit literal (search for VOP_DPP in the GCN ISA guide), and this modifier always applies to the src0 instruction operand. The following example shows how to apply DPP to a particular instruction:
v_and_b32 dest, src0, src1 wave_shr:1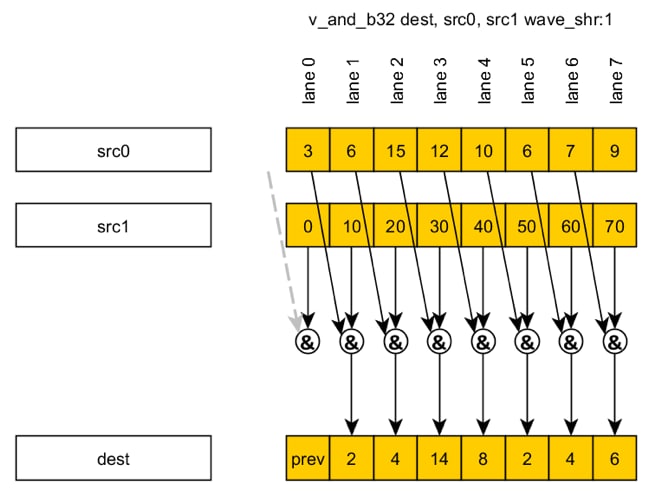
As the example above shows, lane 0 should read from an invalid location (lane –1); hence, it fails to update its corresponding element in the dest register. Alternatively, by setting the DPP-flag bound_ctrl:0 user can read 0 instead of disabling a lane (note that this is legacy notation; the bound_ctrl:0 flag will set the BOUND_CTRL field of VOP_DPP to 1). Lanes disabled by the EXEC mask are also invalid locations from which to read values.
The lanes of a wavefront are organized in four banks and four rows, as the table below illustrates:
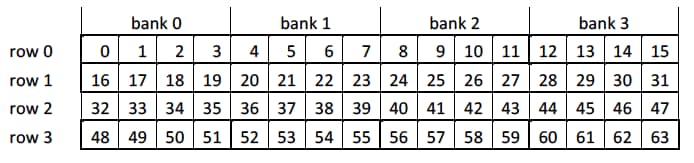
By setting row_mask and bank_mask , you can disable any bank or row in addition to the EXEC mask, which is helpful for scan operations. As a quick summary:
EXEC mask or DPP mask will not update the dest register.EXEC mask
BOUND_CTRL=0 (default).src0 input if BOUND_CTRL=1 (DPP flag bound_ctrl:0 ).Consider the following example, which computes a full prefix sum in a wavefront:
v_add_f32 v1, v0, v0 row_shr:1 bound_ctrl:0 // Instruction 1v_add_f32 v1, v0, v1 row_shr:2 bound_ctrl:0 // Instruction 2v_add_f32 v1, v0, v1 row_shr:3 bound_ctrl:0 // Instruction 3v_nop // Add two independent instructions to avoid a data hazardv_nopv_add_f32 v1, v1, v1 row_shr:4 bank_mask:0xe // Instruction 4v_nop // Add two independent instructions to avoid a data hazardv_nopv_add_f32 v1, v1, v1 row_shr:8 bank_mask:0xc // Instruction 5v_nop // Add two independent instructions to avoid a data hazardv_nopv_add_f32 v1, v1, v1 row_bcast:15 row_mask:0xa // Instruction 6v_nop // Add two independent instructions to avoid a data hazardv_nopv_add_f32 v1, v1, v1 row_bcast:31 row_mask:0xc // Instruction 7The full code is available at GitHub (see dpp_reduce in examples/gfx8 ). Here, source data resides in v0 and the computed prefix sum in v1 . The following image shows data transfers for the above code:
![]()
Lanes containing the final result appear in green, and lanes disabled by the DPP mask are in gray. The DPP masks from instructions 4 and 5 in the code above are optional and leave the result unaffected, because disabled lanes are effectively reading from invalid locations anyway. But the row_mask parameter is necessary for instructions 6 and 7; otherwise, instruction 6 will corrupt values for lanes [0:15] and [32:47] and instruction 7 will corrupt values for lanes [0:31].
The hardware resolves most data dependencies, but the software must handle a few cases explicitly to prevent data hazards. The full list of such cases is in the “Manually Inserted Wait States” section of the GCN ISA guide. For example, a sequence in which a VALU instruction updates an SGPR and a VMEM operation subsequently reads that SGPR is illegal. At least five so-called wait states must sit between these two operations. A wait state is a NOP or any other independent instruction.
Although DPP instructions execute at the full rate, they introduce new data-hazard sources that should be handled in software:
v1 . But DPP applies to v0 , and because v0 is unmodified, wait states are unnecessary.EXEC mask, five wait states are required. This hazard is unlikely to become a problem because it’s triggered only by VALU instructions that write an EXEC mask (any v_cmpx_* , such as v_cmpx_ge_i32 ), and because scalar instructions are unaffected.The DPP literal also has negative- and absolute-input modifiers, so such operations on float input values are free:
v_add_f32 v0, -v1, |v2| wave_shr:1v_add_f32 v0, -|v1|, v2 wave_shr:1These new instructions can be accessed from HCC compiler or from the GCN assembler:
extern “C” int __amdgcn_ds_bpermute(int index, int src) [[hc]];
extern “C” int __amdgcn_ds_permute(int index, int src) [[hc]];
extern “C” int __amdgcn_ds_swizzle(int src, int pattern) [[hc]];
extern “C” int __amdgcn_move_dpp(int src, int dpp_ctrl, int row_mask, int bank_mask, bool bound_ctrl) [[hc]];
When using these instrinsics, HCC will automatically ensure that the proper .waitcnt and data dependencies are honored.
The table below provides notes summarizing our description of the DPP modifier and LDS-based instructions that provide cross-lane data-sharing capabilities.
ds_permute_b32/ ds_bpermute_b32 | ds_swizzle_b32 | DPP Modifier | |
|---|---|---|---|
Description | Instructions that permute lane data on the basis of an address in the VGPR | Instruction that permutes lane data on the basis of a pattern encoded in the instruction’s offset field | Modifier that allows VOP1 / VOP2 instructions to take an argument from another lane |
Available cross-lane patterns | Any |
|
|
Performance considerations |
| Requires |
|
Ilya Perminov is a software engineer at Luxoft. He earned his PhD in computer graphics in 2014 from ITMO University in Saint Petersburg, Russia. Ilya interned at AMD in 2015, during which time he worked on graphics-workload tracing and performance modeling. His research interests include real-time rendering techniques, GPU architecture and GPGPU.

The AMD GPU Services (AGS) library provides software developers with the ability to query AMD GPU software and hardware state information that is not normally available through standard operating systems or graphics APIs.

This article explains how to produce Hsaco from assembly code and also takes a closer look at some new features of the GCN architecture.
Sub DWord Addressing is a feature of the AMD GCN architecture which allows the efficient extraction of 8-bit and 16-bit values from a 32-bit register.